Robot End Effectors - UCLA Biomechatronics Lab
What?
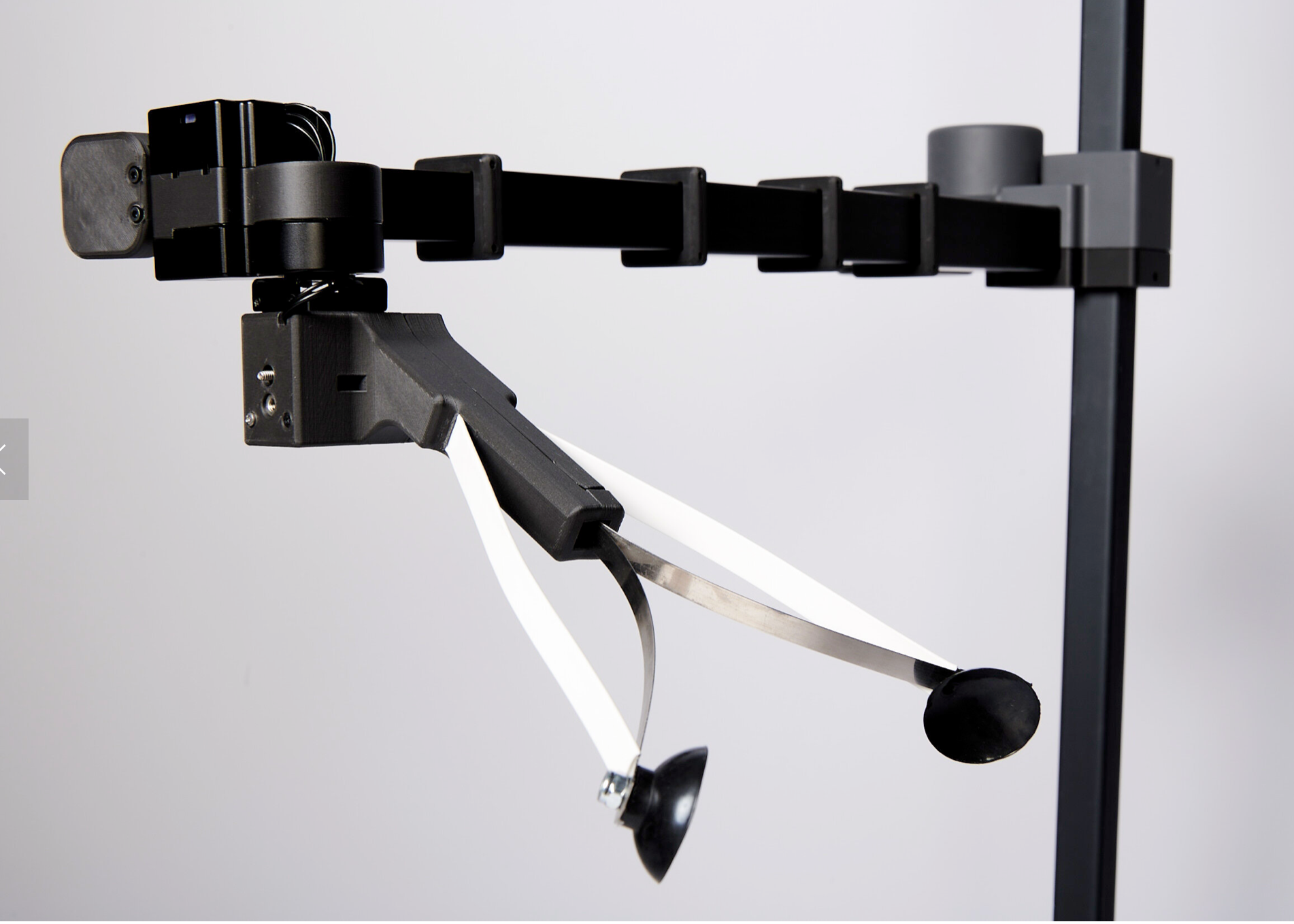
My senior year, I worked with the UCLA Biomechatronics Lab as an undergraduate researcher. The project I supported involved giving the Hello Robot Stretch platform a sense of "touch" through using the surface deformations of suction-cup style end effectors to determine the contact state of the effector (e.g. the force/torque it is applying). I was responsible for developing a suction cup manufacturing method that could be replicated by other labs, and designed new cups as we explored the limits of the molding process and our tracking hardware.

How?
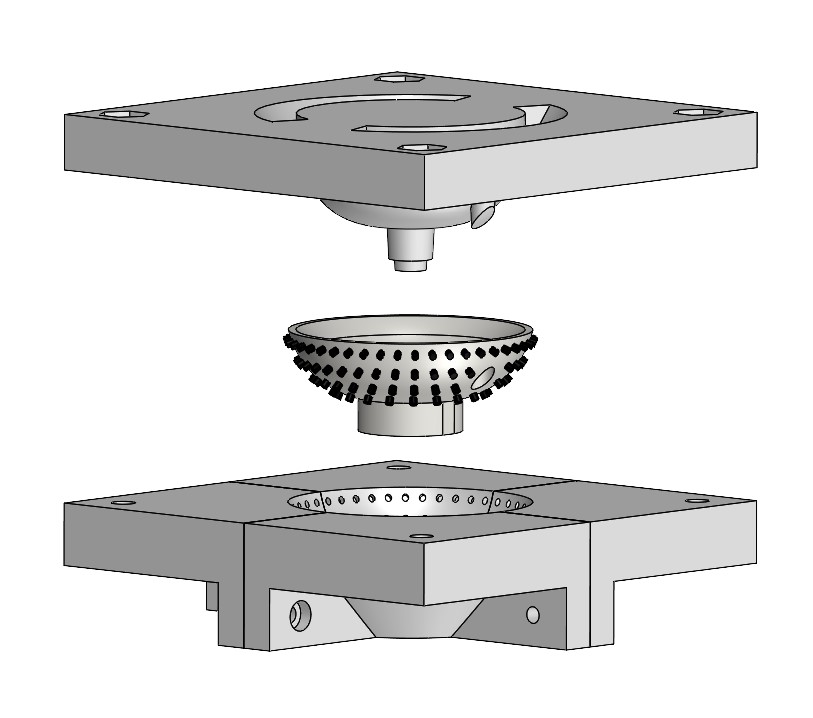
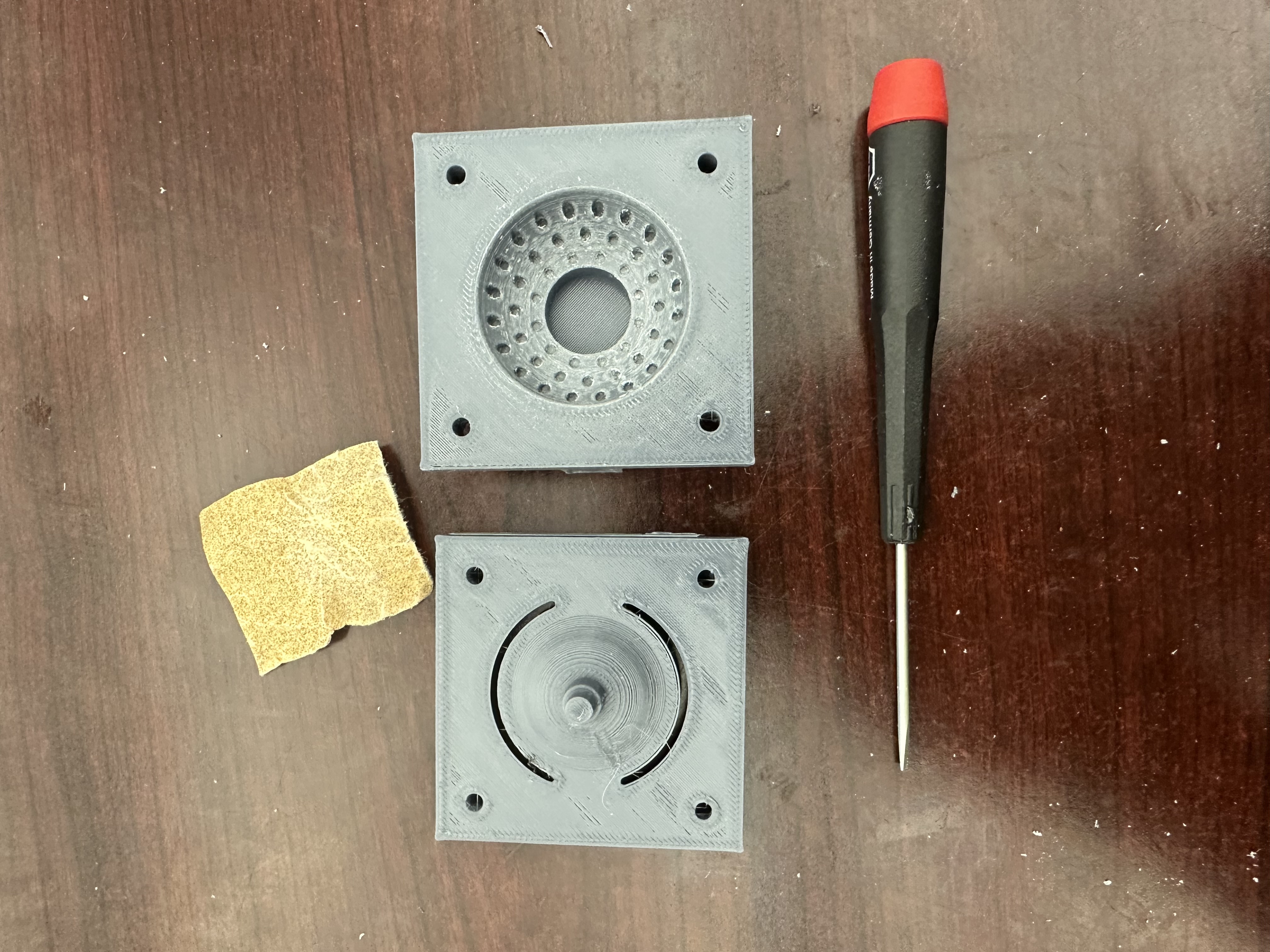
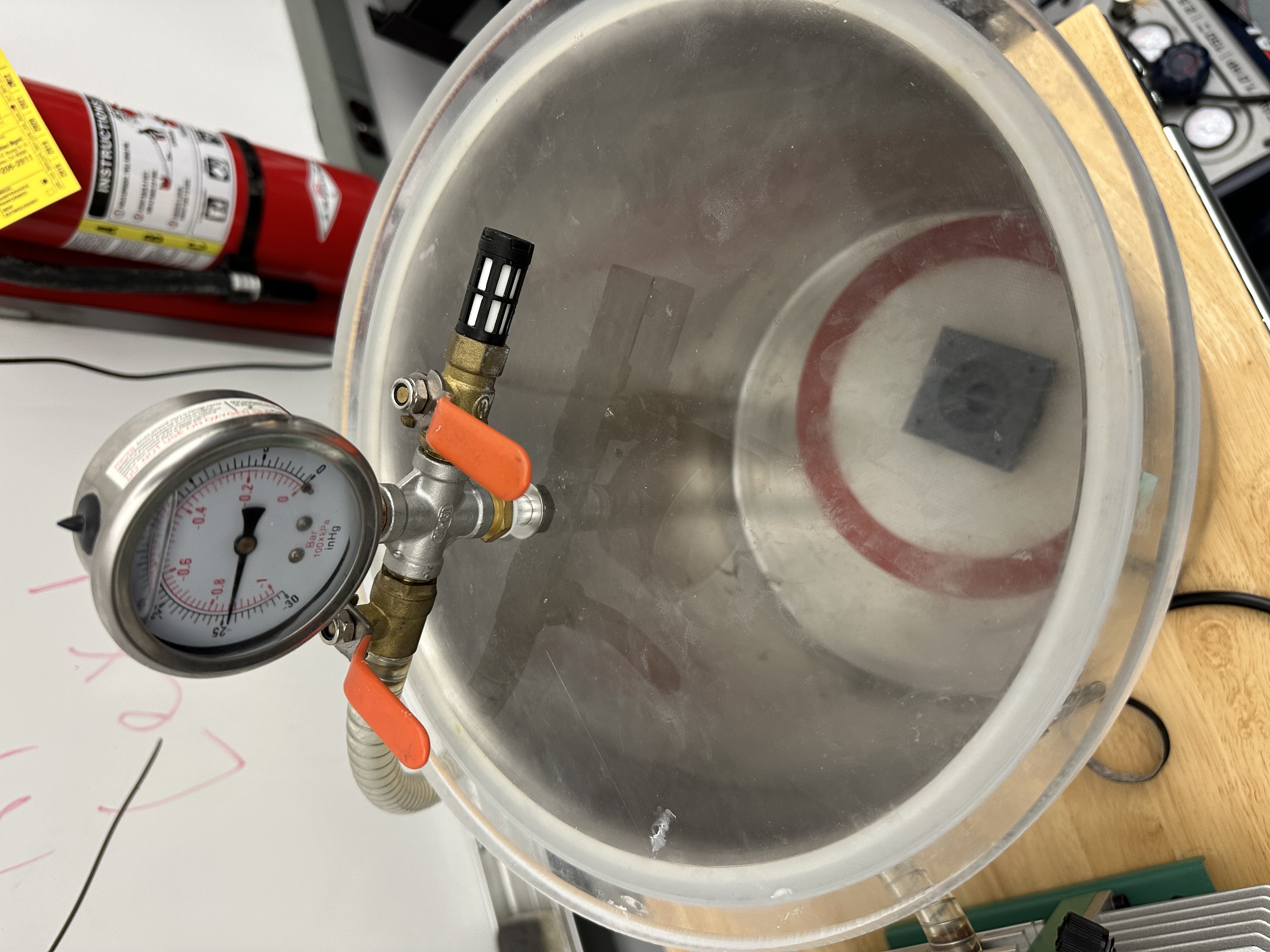
I designed a series of FDM 3D printable molds using SolidWorks, and applied molding principles to ensure manufacturability and part quality. I also worked on refining the manufacturing process (e.g. elastomer heating and the vacuum degassing procedure) and tested different materials (3D printed flexible resin, polyurethane, and silicone). Please see the knowledge transfer document at the bottom of the page for a more complete summary of the (many) iterations of the cup design process.
Results
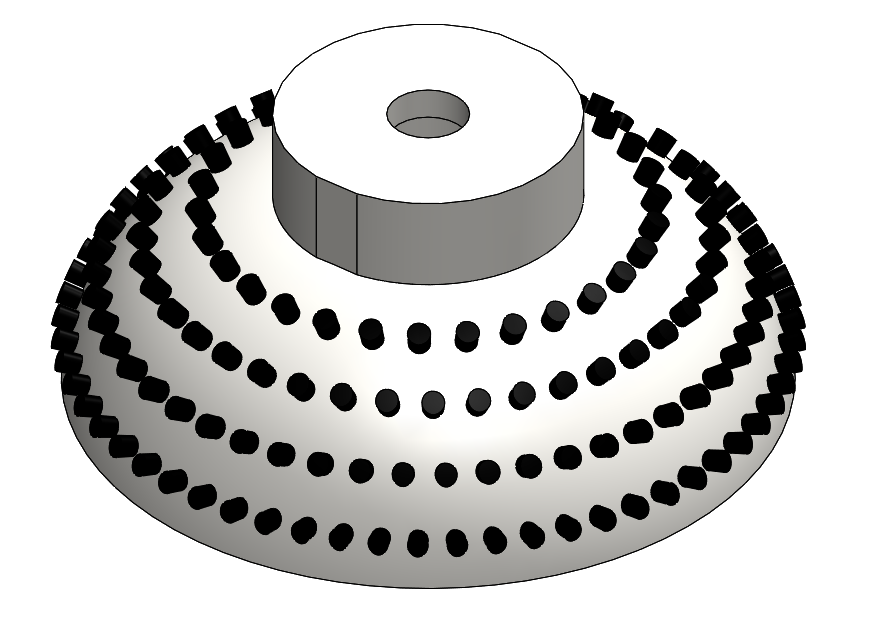
While there is still some room for improving surface finish, I achieved successful molding of the overall cup geometry with high-resolution tracking features in both silicone and polyurethane. Through detailed knowledge transfer, those picking up end effector molding will have a strong starting point and know which direction to head.



Suction Cup Molding Knowledge Transfer
Below is a document I wrote outlining the suction cup manufacturing process for researchers picking up where I left off.